![]()
「あてもなく歩く」の知性
―そぞろ歩きを自由エネルギー原理から読み解く
2026.06.25
パラメトリック・ボイス
東京大学 玉田 大

少しでも曲がっていることで視界が狭くなり、この先を探索した
くなる細い路地(筆者撮影)
はじめに
東京大学 豊田研究室の玉田です。前回のコラムでは、物理世界を理解するという意味での
「フィジカルAI」の動向と、人間の身体と環境の相互作用による認知についてご紹介しまし
た。この動向はその後も継続しており、ロボットなどの空間認知や空間学習は、与えられた目
的やタスクの遂行のために最適化される方向へと発展しています。
一方、人間の側に目を向けると、目的地が決まっているときの移動は、GPSをはじめとする経
路案内の支援に委ねられるようになりました。つまり、機械の知能も人間の道具も、担ってい
るのは「目的が与えられた部分の最適化」だといえそうです。しかしながら人間には、見知ら
ぬ街をあてもなく歩く、そぞろ歩きと呼ばれるような「探索」という営みが残っています。そ
して、どの路地に惹かれ、どんな風景に足を止めるか、そこには生まれ育った環境やそれまで
の経験により育まれた好みがにじみます。人はそうした探索を通じて空間に対する知識を蓄え、
更新するという「認知プロセス」を繰り返しつつ、やがてその場所への情動や記憶を形づくっ
ていくのだと思います。なお、ロボットにも探索と呼ばれる振る舞いはありますが、それは多
くの場合、地図の構築やタスク達成のための手段としての探索です。
環境や空間をつくる建築・都市分野にとってこの「認知プロセス」を紐解くことは、フィジカ
ルAIが進展する現状において興味深いアジェンダであると思います。ロボットなどの空間認知
能力が社会環境に顕現されるにつれて、人間とロボットの違いだけではなく、そもそも人間の
空間認知とはなんだろうという疑問に、自然と向き合うことになる気がするからです。本稿で
は、見知らぬ街をあてもなく歩く「探索」を手がかりに、人間が環境をどのように理解し、そ
の理解を更新しながら行動しているのかについて、この後に触れる自由エネルギー原理という
枠組みから考えてみたいと思います。
これまでの都市研究における環境と人間の関係
自由エネルギー原理の話をはじめる前に、都市環境と人間の関係について、これまでの研究を
ベースに、簡単に整理したいと思います。
都市環境と人間の関係は、建築・都市分野でも長く研究されてきました。例えば、
ケヴィン・リンチの「都市のイメージ」に代表される、人が街をパスやランドマークといった
要素でどのように頭の中に描くのかという空間知識に関する研究の系譜が挙げられます。
また、Space Syntaxのような街路構成などに関する空間解析と歩行のパターンを結びつける
研究をはじめ、どのような空間の特性がどのような心理や行動を生むのかという研究の系譜も
あります。
また、直近の論文レビューによれば、GPS軌跡、視線、心拍・脳波といった生理データ、映像
など、人間と環境の相互作用をリアルタイムで捉えることができる新しいデータが活用される
ようになっています。しかしながら、同レビューでは、研究対象の約半数が「行動」という結
果を扱っている一方、その背景にある「認知」を扱う研究は全体の5%程度にとどまることが
示されており、人間と環境との相互作用研究において、観測しやすい行動面に比べ、行動の背
後にある認知プロセスへの関心が相対的に薄いことが示唆されます。また、そこで示されてい
る既存研究の多くは、特定の環境特性と人間の反応・行動との対応関係、例えば「緑の多い街
路では歩行が促されやすい」といった関係の検証として整理できます。
これらの研究成果は、「どこで・何が起きやすいか」を教えてくれる貴重な知見です。一方で、
街を歩く中で認知が時間とともにどう更新され、その更新が次の行動をどう生むのかという、
「なぜ・どのように起きるのか」に関わる「認知プロセス」の理解は、時々刻々のデータが取
れるようになった今でも、まだ十分に向き合われていないように思われます。
人間の認知プロセス理解としての都市探索
この「認知プロセス」を理解するのに適した対象が、目的地を持たない探索行動だと考えてい
ます。例えば、初めて訪れた街でのそぞろ歩きを思い浮かべてみると、まず何かが目に入り、
その場所について何かしらの見当をつけ、進む先を選び、新たな風景に出会ってまた見当を改
める。この循環そのものが、歩くという行為を形づくっています。しかも、どちらの路地に進
むか、どんな風景に足が止まるかは人によって違い、そこにはその人がそれまでに培ってきた
好みがにじみ出ます。
目的地への到達は、着いたかどうかという結果で評価されます。しかし探索には、外から与え
られた結果がありません。だからこそ探索は、知覚と判断と行動が更新されていく「認知プロ
セス」そのものを捉えるための、有効な対象になるのではないかと考えています。
この循環は、前述のような計測技術を使えば、データとして記録することはできます。ただ、記
録の羅列は、まだ理解ではありません。「何が、どう変われば、次の行動がどう変わるのか」
という関係について、構造的に記述できて初めて、関係の背後にある仕組みに踏み込む余地が
生まれます。そこで、知覚・判断・行動の更新という循環を、一つの構造として扱える枠組み
として「自由エネルギー原理(Free Energy Principle)」、そして「能動的推論(Active
Inference)」がクローズアップされることになります。
自由エネルギー原理、そして能動的推論
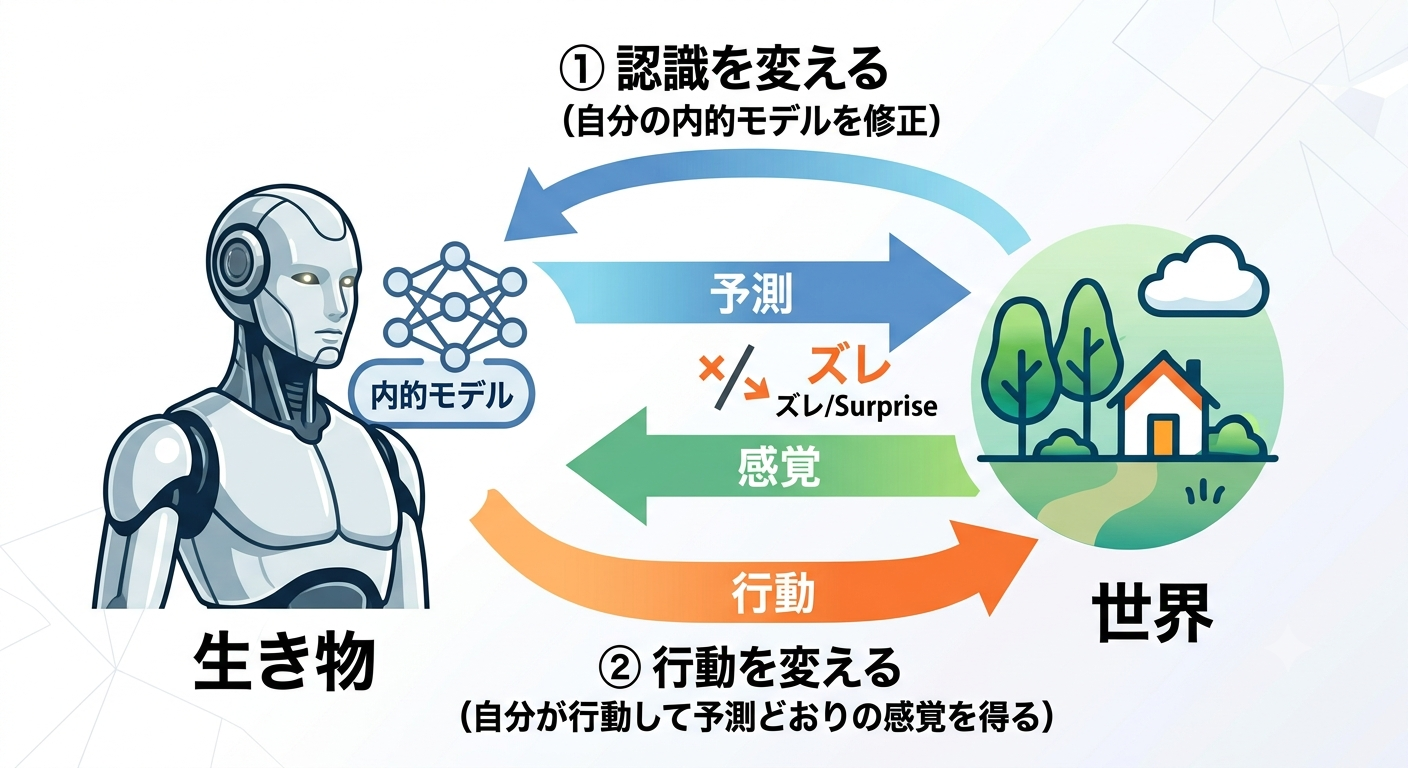
能動的推論の概念(筆者が生成AIにて出力)
近年、神経科学や認知科学を中心に注目されている考え方に「自由エネルギー原理」がありま
す。これは大まかにいえば、生き物は頭の中に「世界はこうなっているはず」という予測を
持っており、感覚から入ってくる現実と予測とのズレ(驚き)をできるだけ小さく保つように
知覚し、行動する、という原理です。
ズレを小さくする方法は2つあります。ひとつは、予測の側を改めることです。角を曲がった
先に商店街があると思っていたら住宅地だったとき、私たちは「この街はこういう構造らしい」
と頭の中の見立てを更新します。これが知覚や学習にあたります。もうひとつは、自ら動いて
情報を取りに行くことです。見通せない路地の先を確かめるために歩を進める、といった行動
がこれにあたります。行動によって能動的に予測のズレを減らしにいくという意味で、この原
理を知覚と行動の枠組みとして展開したものが「能動的推論」と呼ばれています。
能動的推論は、知覚・推論・学習等の異なる認知過程を統一的に扱う計算論的枠組みであり、期
待自由エネルギーの最小化することが行動選択の基準となり、期待自由エネルギーは、認識的
価値(環境知識に関する不確実性の低減・情報利得)と実用的価値(事前の選好や目標の充足)
の関係として定式化されます。本稿では計理理論までは踏み込みませんが、認識的価値は、行
動選択する際に直接確認できない隠れた状態に関する不確実性を最も減少させるような感覚入
力を能動的にサンプリングするものとして、また実用的価値は、継続的なサンプリングにより
空間理解が進むにつれて探索目標が立ち現れ、その充足のためのものとして説明されます。つ
まり、歩き始めは分からないことだらけですから認識的価値が効き、人は未知の方へ向かいま
す。歩くうちに情報がたまり、「この街ではこの界隈が好ましい」という見立てが立ち上がっ
てくると、重心は実用的価値へ移っていきます。目的地は最初から与えられているとは限らず、
こうした過程の中から立ち現れることもある、と説明できるわけです。
また、ここで重要なのは、実用的価値の核にある「事前の選好」が、生まれ育った環境やそれ
までの経験に根ざすものとして位置づけられる点です。私は以前、生育環境の物理的な形態が
空間認知の個人差と関係することを示す研究を発表しましたが、こうした個人差は、この枠組
みの中では選好や事前の信念のパラメータとして位置づけられます。冒頭で述べた「歩き方に
好みがにじむ」という内容は、こういったパラメータで書き直せる見込みがあると考えていま
す。
そして、冒頭で触れた「目的を与えられた部分の最適化」は、実用的価値が最初から固定され
支配的になったケースにあたります。機械の空間知能と人間の探索は、別々の話ではなく、同じ
構造の上の異なる局面として記述できるのかもしれません。
さいごに
フィジカルAIが空間を理解し、ロボットやエージェントが物理世界の中で行動する時代が近づ
くほど、そもそも人間は空間をどのように理解しているのかという問いが、改めて浮かび上
がってきます。機械の空間知能が、与えられた目的やタスクを効率よく達成する方向へ発展し
ていくとすれば、ここまで見てきた都市探索は、それだけでは捉えきれない人間の空間理解の
あり方を考える手がかりになります。探索において人は、最初から明確なゴールを持っている
とは限らず、歩く中で場所の見立てを更新し、進む先を選び、街に対する理解や好み、記憶を
少しずつ形づくっていきます。ここでは、行動の結果だけでなく、知覚・判断・行動が時間と
ともに更新されていくプロセスそのものが重要になります。
自由エネルギー原理や能動的推論は、このようなプロセスを考えるための一つの補助線になる
と思っています。人間が環境から何を受け取り、何を予測し、どのようにズレを修正し、次の
行動を選んでいくのか。それを、知覚、学習、行動選択を切り離さずに捉える枠組みとして見
ることができます。もちろん、都市探索を能動的推論で説明することは、まだ試論の段階です。
しかし、時々刻々のデータが取れるようになった今だからこそ、単に「どこで何が起きたか」
だけでなく、「なぜ、どのように次の行動が生まれたのか」という問いに向き合う余地が広
がっているように思います。
フィジカルAIが空間の知能を獲得していく時代には、環境をつくる側にとっても、環境を生き
る人間の理解がこれまで以上に重要な意味を持つように思います。目的地なく街を歩くという
素朴な行為は、その理解に近づくための入口であると同時に、ロボットやエージェントが経験
を通じて空間への見立てや選好を更新していく未来を考えるうえでも、示唆を与えてくれるの
かもしれません。
東京大学生産技術研究所豊田研究室メンバーの持ち回りコラムとして執筆させていただきまし
た。他の回もお時間がありましたら是非ご覧ください(他のコラムはこちらから)。
参考文献:
1. Wang, Z., et al. (2025). Understanding human-environment interaction in urban
spaces with emerging data-driven approach: A systematic review of methods and
evidence. Cities, 167, 106346. doi:10.1016/j.cities.2025.106346
2. Parr, T., Pezzulo, G., & Friston, K.J. (2022). 能動的推論―心、脳、行動の自由エネルギー
原理. ミネルヴァ書房.
3. 玉田大, 樋野公宏, 浅見泰司 (2024). 生育環境と空間認知の関係. 日本建築学会計画系論
文集, 89(822), 1486–1493. doi:10.3130/aija.89.1486
最新の記事